Process
- The term process, used in the process control and process industry, refers to the procedures used to modify or refine raw materials to produce finished goods.
- The raw materials are moved, measured, combined, heated or cooled, filtered, stored, or handled in some other way to create the finished product. During the process, the raw materials either pass through or remain in a liquid, gaseous, or slurry (a mixture of solids and liquids) condition.
List few examples of Process Industries.
- Pharmaceutical & Chemical industries
- Oil and gas refining
- Food and beverage
- Water treatment
Process Control
Process control refers to the techniques used to regulate process variables during product manufacturing.For instance, the ratio of one ingredient to another, the material’s temperature, how well they are mixed, and the pressure at which they are held can all have a big impact on the final product’s quality.
For a variety of reasons, manufacturers have control over the production process, including:
- Lessen the variability
- Boost output and effectiveness
- Assure environmental, health, and safety
Process Variable
A process variable is a characteristic of the process fluid (a liquid or gas) that has the potential to alter the manufacturing process in some way. The process variable in the illustration of lounging by the fire was temperature.
Example of process variables are Pressure, Flow, Level, Temperature, Density, Oxygen content, Carbon monoxide content, Liquid interface, Mass etc.
What are the main goal of automatic process control?
The four main goals of automatic process control are listed below.
- Reducing the impact of external disturbances
- Improving performance
- Boosting Productivity
- Economical cost
What is the basic functions of automatic controller?
- To obtain the variable being measured actual measured value.
- To contrast that value with a benchmark or ideal value.
- To use a comparator to calculate the deviation.
- To deliver a control signal at the output to bring the deviation down to zero or a minimal value.
Types of Control
- Open Loop Control
- Closed Loop Control
Open Loop Control
- The non-feedback system is another name for the open-loop system
- Without employing feedback, it uses an actuating device to regulate the process directly.
- Examples of open-loop control systems are water heaters like gas and electric geysers.
- Of the two systems, this one is the simplest.
- However, since the parameter cannot be controlled with the requisite accuracy, its usage in the industry is restricted.
- There is just a forward movement from the input to the output in an open-loop control system.
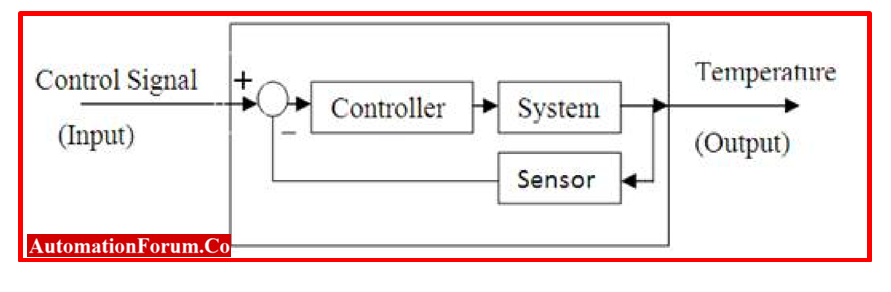
Closed Loop Control
- The feedback system is another name for the closed-loop system.
- Using the difference between the output and reference input, a feedback control system regulates the operation.
- A closed-loop control system compares the measured output with the desired output using feedback from the measurement.
- This creates an error signal that the controller can utilize to control the plant.
- Closed loop is further classified into single control loop, multivariable control loop( Feed forward , Feed forward + Feed back, cascade etc)
Control Loops
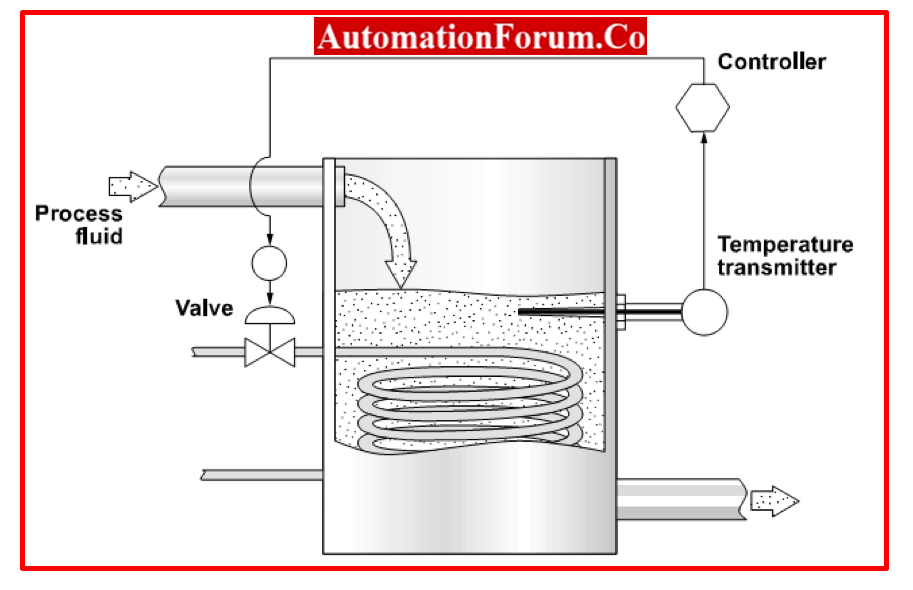
Single Control Loops
- A feedback loop takes a measurement of a process variable and delivers it to a controller for comparison to the set point.
- Control action is conducted to bring the process variable back to set point if it is not at set point.
- Feedback loop in which a transmitter monitors a fluid’s temperature and, if necessary, opens or closes a hot steam valve to modify the fluid’s temperature.
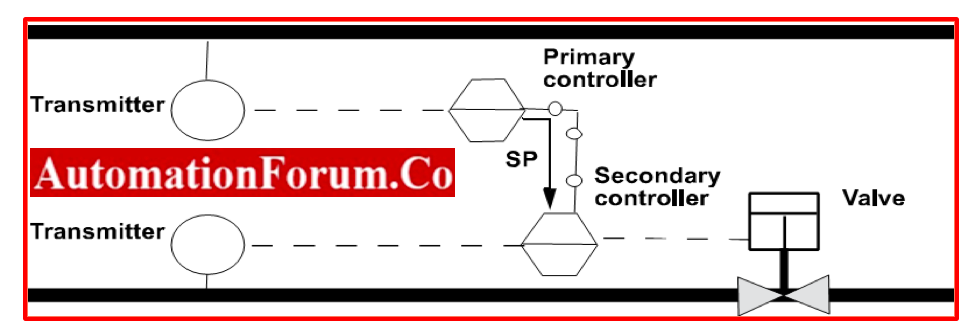
Multivariable Loops
- Multivariable loops are control loops in which a primary controller sends signals to a controller of a secondary loop to regulate a different process variable.
- The temperature of the fluid in a tank heated by a stream jacket, for instance, could be the main process variable (a pressurized steam chamber surrounding the tank).
- The major (master) controller, which regulates steam pressure, controls the principal variable (temperature).
- The primary controller will change the primary process variable’s set point temperature.
Sensors or Transducers
- A sensor detects the nature, significance, and value of the process variable, which reflects the instrument’s output.
- A transducer is a device that produces an output that can be used in response to an input that can be a mechanical or physical quantity, property, or situation. The transducer can be mechanical, electrical, magnetic, optical, chemical, thermal, nuclear, acoustic, or a combination of two or more.
Pressure sensors
- Based on range of pressure the instrument is decided
- When a visible signal of low pressure is needed, manometers are utilized.
- A Bourdon tube pressure gauge is used for medium pressure or vacuum sensing.
- Bellows-type instruments are occasionally used for this.
- When an electrical output is needed, a diaphragm type sensor with strain gauge, capacitive is utilized.
- If very high measurement accuracy is required, resonant-wire devices are popular.
- For differential pressure measurement, diaphragm-type sensors are favored, with double-bellows sensors employed sometimes.
Temperature sensors
- Thermocouples, thermopiles, resistance thermometers, thermistor, semiconductor devices, and color indicators are the only options if the medium is solid.
- With the exception of radiation thermometers, all instruments can measure fluid temperatures.
- The base-metal thermocouple is the industry standard for measuring temperature.
- Resistance thermometers with a 0.5% measuring inaccuracy are used from -270°C to +650°C.
- Sensors include thermometers. They are little and cheap. They respond quickly to temperature changes and have strong measuring sensitivity, but their measurement range is limited.
- Semiconductor devices have superior linearity and accuracy than thermocouples and resistance thermometers. They are a feasible alternative to these in many applications.
- Radiation thermometers or optical pyrometers can be used for non-contact, non-invasive measurement. They measure temperature exceeding 600°C in industrial furnaces.
- Bimetallic thermometers and other instruments based on the thermal expansion principle are utilized as temperature indicators and automatic control system components.
Flow sensors
- There are many elements to consider when specifying a flow meter for an application.
- They include the fluid’s temperature and pressure, density, viscosity, chemical characteristics, abrasiveness, particle content, liquid or gas state, etc.
- Variable-area meters are popular for flow rate indication.
- When a flow measurement in the form of an electrical signal is needed, there are many options.
- Orifice plates, differential pressure meters, and electromagnetic flowmeters are examples.
- Turbine meters and positive displacement meters are being replaced by ultrasonic and vortex meters in the present flow measuring trend.
Level Sensors
A level sensor measures the level of a liquid or solid substance in a tank or container. Level sensors come in a variety of forms, including ultrasonic, capacitive, and radar sensors. The sensor typically communicates the material’s current level through a signal to a control system or display device.The processing of food and beverages, water treatment, oil and gas, and other industries all use level sensors. For these businesses to operate safely and effectively, accurate level measurement is essential. The level sensor must undergo routine calibration and maintenance to continue to deliver accurate readings.
- Sensors for float level: These sensors function by using a float that lies on the liquid’s surface, and a sensor that monitors the float’s movement. Although they are easy to use and dependable, they are susceptible to turbulence and wave movement.
- Sensors that measure level based on conductivity: These sensors use the liquid’s conductivity to calculate the level. They are very helpful for determining the concentration of conductive liquids, such as water.
- Capacitance level sensors: These sensors gauge the level by measuring the capacitance of the liquid. They are very helpful for figuring out how much non-conductive liquid is present.
- Ultrasonic level sensors: These sensors measure the liquid’s level using ultrasonic waves. They are frequently utilized in silos and tanks.
- Optical level sensors: These sensors measure the level of the liquid using infrared light. They are very helpful for determining the concentration of transparent liquids.
- Radar wave level sensors: These sensors employ radar waves to gauge the liquid’s level.
Types of Controller
Proportional Control Mode
- In the proportional (throttling) mode, the value of the controlled variable and the location of the last control element have a continuous linear relationship.
- In this control mode, the controller’s output is proportional to error e. (t).
- The proportional gain constant, abbreviated Kp, controls the relationship between the error e(t) and the controller output p.
- The controller’s output is a linear function of e. (t).
p(t) = Kpe(t) + p(0)
Kp refers to Proportional gain constant, P(0) refers to Controller output with zero error or bias
- With the proportional controller mode, both direct and reverse actions are available.
- The action is referred to be direct action if the controlled variable, or input to the controller, increases and results in an increase in the output of the controller.
- Example: To maintain the liquid level in a tank, for instance, the output valve must be managed. The valve should be opened more to maintain the level if the level rises.
- On the other side, the action is known as reverse action if the variable drops and results in an increase in the controller output.
- Conversely, increasing the controlled variable might also result in a decrease in controller output.
Integral Control Mode
- With integral action, the output of the controller is proportional to the duration of the error.
- When proportional control is applied, offset is still there and is eliminated by integral action.
- In such a controller, the value of the controller output p(t) changes at a rate proportionate to the actuating error signal e(t).
- Mathematically, it is expressed as:

Where Ki= constant relating error and rate
- The Ki is also known as the integral constant.
- The actual output at any moment t can be determined by integrating the above equation as

p(0) = controller output when integral action starts i.e. at t = 0.
Derivative Control Mode
- In this mode, the controller’s output is based on the rate of error change.
- As a result, it is also known as rate action mode or anticipatory action mode.
- The mode’s mathematical equation is:

where Kd is the derivative gain constant.
- The derivative gain constant tells us how much the controller output must vary for every percent per second that the error is changing.
- Kd is often stated in minutes.
- The key characteristic of this sort of control mode is that the controller output has a unique value for each rate of change or error signal.
- The benefit of the derivative control action is that it responds to the rate of error change and can generate a major correction before the actuating error’s magnitude increases to an unmanageable level.
- Hence, derivative control foresees the actuating error, starts an early corrective operation, and tends to make the system more stable, enhancing transient response.
- Because the derivative or differential controller has either no output or the nominal output for zero error when error is zero or constant, it is never utilized alone.
Proportional-Integral Control
- This control mode is the outcome of combining the proportional and integral modes. This can be expressed analytically as:
p(t) = Kp e(t) + Kp Ki e(t) dt + p (0)
- The one-to-one correspondence of proportional mode is provided, and integral mode eliminates the inherent offset, which is the fundamental benefit of this composite control mode.
Proportional-Derivative Control
- This combines proportional and derivative modes in a series or cascade. The following is an example of the controller output:
P(t) = Kp e(t) + KpKd + P (0)
- The offset of proportional controllers cannot be eliminated by this technique.
- As long as the offset error is tolerable, it can manage rapid changes in process load.
Proportional Integral Derivative Controller
- The three-mode controller, the most flexible of all controller actions, uses proportional, integral, and derivative (PID) action.
- The proportional component of this controller amplifies the mistake by a fixed factor.
- The inaccuracy is incorporated into the integral part.
- The derivative component distinguishes the error.
- These can be coupled to create a system that reacts fast to changes (derivative), tracks necessary locations (proportional), and lowers steady state mistakes (integral).
- If Kp, Ki, and Kd are the proportional, integral, and derivative gains, respectively,
p(t) = Kp e(t) +KpKi e(t)dt + KpKd + p(0).
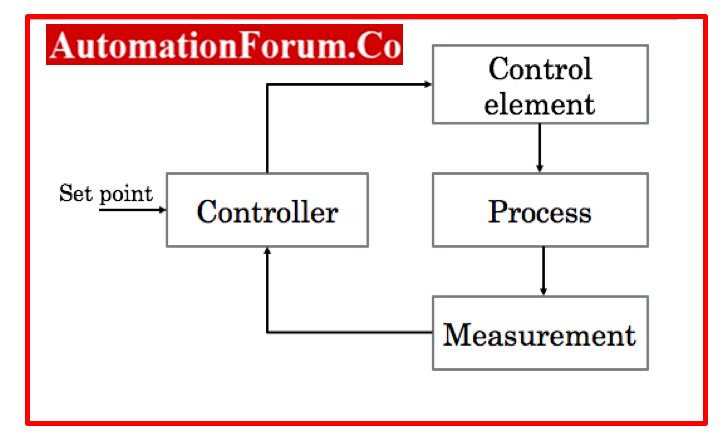
What are the elements of Process Control?
The basic elements used for building a process control
- Process
- Measurement
- Controller
- Control element
Process
- In process control, the term “process” refers to the procedures utilized to turn raw resources into finished goods
- To create the finished product, the raw ingredients that either move through the process or are kept in a liquid, gaseous, or slurry (a mixture of solids and liquids) state are transported, measured, mixed, heated or cooled, filtered, stored, or managed in some other manner.
- It could be useful to control all of the dynamic factors in a process at once.
Measurement
- In order to do control, the process parameter must be measured so that we can gather data on the variable itself.
- A measurement is, in general, the conversion of a variable into a matching analogue, such as a pneumatic pressure, an electrical voltage, or current.
- A transducer is a device that performs the initial measurement and energy conversion of a dynamic variable into equivalent electrical or pneumatic information.
- To complete the measurement function, additional transformation or signal conditioning can be needed.
- The measurement process transforms the dynamic variable into some usable proportional information that is needed by the other components of the process-control loop.
Controller
- A controller receives data from a measurement instrument, compares it to a programmed set-point, and, if necessary, signals a control element to adjust it.
- An operator, electronic/pneumatic signal processing, or a computer can evaluate.
- The controller requires an expressed desired value and a measured representation of the dynamic variable.
- Set point is the desired value of the dynamic variable.
- Hence, the evaluation compares the controlled variable measurement to the set point and determines the action needed to get the controlled variable to the set point value.
Control element
- The correcting or final control element physically changes the altered variable.
- This element accepts a controller input and converts it into a proportionate operation on the process.
- In any process control loop, final control components repair out-of-set variables.
- The final control element is usually a valve/servo motor that restricts or stops fluid flow, although it can also be a motor, louvre, solenoid, or other device.
- A final control device may regulate fuel/air flow to a burner to control temperature or catalyst flow into a reactor to control a chemical reaction.
What are the four important process variables?
Pressure, Temperature, Flow, Level
Define following terms in process control.
Process Variable
The real value in the feedback loop, including temperature, pressure, flow, composition, pH, and so on. Process Value can be found here.
Set Point: The process variable’s desired value is known as the set point
Process Gain
- Process Gain is defined as process output to the change in process input.
- A process with a high process gain responds more strongly to changes in the process input than a process with a low process gain.
Transmitter
The real value of a system can be sensed by a transmitter, which then converts that value to a standardized signal (4-20) mA is a common standard for analogue signals) that can be used as an input for a control system.
Brief features of Analog controller
- Analog controllers are located in a central control room, distributed control & monitoring
- High cabling cost
- Large central monitoring panel for many controllers
- Difficulty implementing control algorithms other than PID
- Difficulty coordinating control loops.
- PLC- Programmable Logic Controller which is simple continuous control, faster in system shut down & emergency shut down
Brief features of Digital Controller.
- Digital components are less susceptible to aging & environmental variations
- More dependable and less sensitive to parameter variations, noise, and disturbance
- Compact and lightweight digital processors
- Example – DCS
{kind=link}